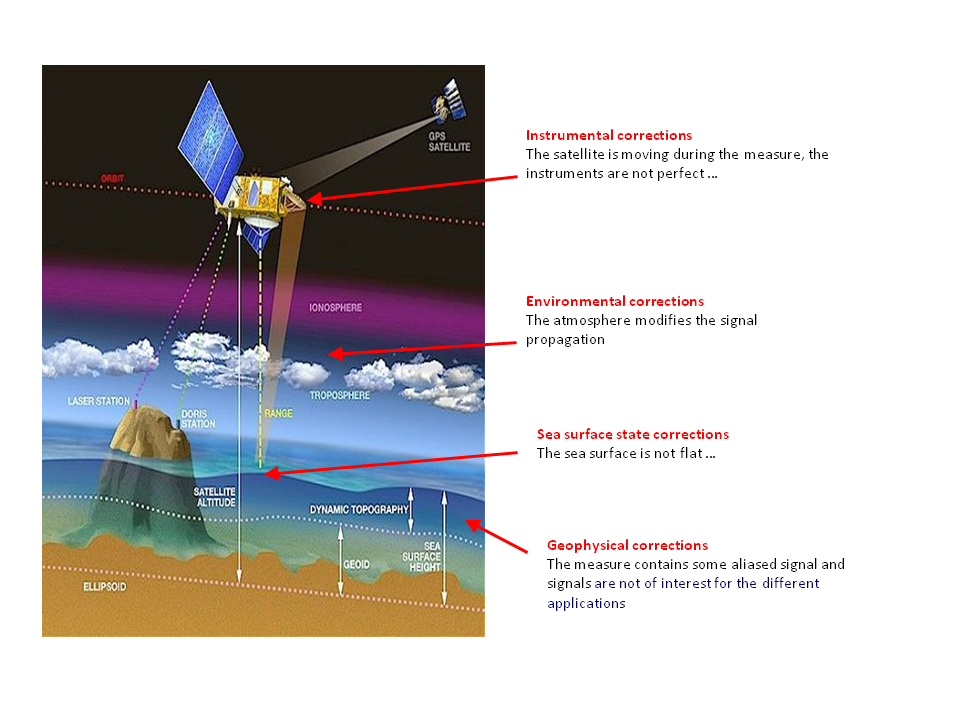
The altimeter measurement is affected by different errors as illustrated by the following figure and discussed in Escudier et al. (2017):
|
Along-track measurements (Level 3) – main sources of errors
|
Merged product (Level 4) – main sources of errors
|